UC Berkeley Develops 'Deep Learning' for Robot
- By Dian Schaffhauser
- 05/21/15
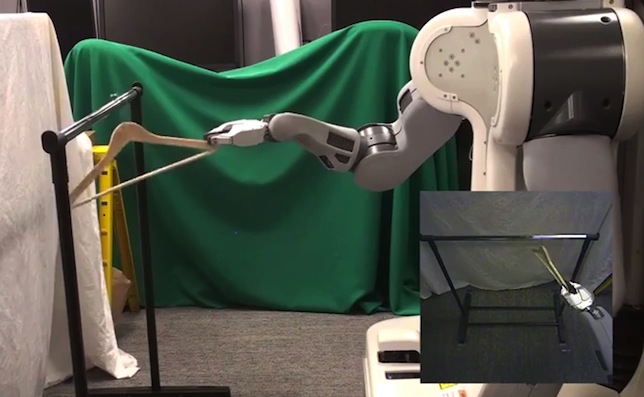
The same sophisticated approach to pattern matching that Siri and Cortana use to respond to questions more accurately is now helping a robot
at the University of California Berkeley learn how to screw caps on bottles and rack up
a hanger with an ever-growing repertoire of dexterity. Rather than programming each type of task, the researchers there are relying on
algorithms that direct the robot to use trial and error, learning as it goes, more closely resembling the way humans learn.
Among the activities already mastered by "BRETT" (Berkeley Robot
for the Elimination of Tedious Tasks) are assembling a toy plane, fitting the claw of a toy hammer under a nail with various grasps and
figuring out where the square peg belongs. BRETT is actually a
Personal Robot 2 (PR2) produced by Willow Garage.
"What we're reporting on here is a new approach to empowering a robot to learn," said Pieter Abbeel, a professor in the university's
department of Electrical Engineering & Computer Sciences, in a prepared
statement. "The key is that when a robot is faced with something new, we won't have to reprogram it. The exact same software, which encodes how
the robot can learn, was used to allow the robot to learn all the different tasks we gave it."
Most robotic applications work in a controlled environment "where objects are in predictable positions," added Trevor Darrell, co-researcher
and director of the Berkeley Vision and Learning Center. "The challenge of putting
robots into real-life settings, like homes or offices, is that those environments are constantly changing. The robot must be able to perceive
and adapt to its surroundings."
The project turned to an area of artificial intelligence referred to as "deep learning," which is loosely inspired by how the human brain
perceives and interacts with the world through ever-changing neural circuitry. The robot includes a "reward" function that provides a score
based on how well it performs a given task. Like a game of "hot and cold," motions that get the robot further along in the task earn a higher
score, which feeds back into the neural net so the robot can "learn" which movements are the best ones for the activity.
The robot has the capacity of tracking the connections among 92,000 parameters vs. about 100 billion neurons in the human brain.
According to the researchers, given the relevant coordinates for the start and end of a task, BRETT could master a typical assignment in
about 10 minutes. When the robot didn't know where objects were located and had to learn those coordinates as well, the learning process could
take about three hours.
With more data, said Abbeel, the robot can learn more complex operations. "We still have a long way to go before our robots can learn to
clean a house or sort laundry, but our initial results indicate that these kinds of deep learning techniques can have a transformative effect
in terms of enabling robots to learn complex tasks entirely from scratch. In the next five to 10 years, we may see significant advances in
robot learning capabilities through this line of work."
The research is coming out of a new People and Robots Initiative
at introduced at the University of California's Center for Information Technology Research in
the Interest of Society (CITRIS). CITRIS is focused on projects researching how people and machines can work together. The research team
will present a poster session on its findings at the International Conference on Robotics and
Automation (ICRA), taking place at the end of the month in Seattle.
The work is being funded in part by the Defense Advanced Research Projects
Agency, the Office of Naval Research, the
United States Army Research Laboratory and the
National Science Foundation.
About the Author
Dian Schaffhauser is a former senior contributing editor for 1105 Media's education publications THE Journal, Campus Technology and Spaces4Learning.